Robôs são enviados para explorar caverna vulcânica com o objetivo de facilitar a exploração de Marte
Robôs exploram tubos de lava em Lanzarote para futuras missões em Marte e na Lua.
Enquanto a missão Artemis II visa levar humanos de volta à Lua, agências espaciais estão focadas na exploração de outros planetas. Nesse contexto, a robótica espacial se torna fundamental, uma vez que ambientes como Marte são extremamente hostis à vida.
Um grupo de pesquisa europeu, que inclui a Agência Espacial Europeia, desenvolveu um sistema robótico autônomo dentro de um tubo de lava vulcânica na ilha de Lanzarote, na Espanha. Tubos de lava são formações naturais criadas por fluxos de lava durante erupções, e suas características podem facilitar a futura colonização de outros corpos celestes.
A superfície de Marte e da Lua não é plana e desértica, mas sim composta por terrenos vulcânicos com grandes cavidades formadas por lava. Essas cavernas são suficientemente amplas para abrigar cidades, devido à baixa gravidade que permite estruturas de grandes dimensões.
As cavernas do tipo “tubo de lava” são encontradas na Lua, em Marte e na Terra, como no Havaí ou nas Ilhas Canárias, onde a pesquisa foi realizada. O tubo de lava de La Corona, em Lanzarote, apresenta trechos de até 30 metros de largura e altura, comparáveis ao tamanho de uma catedral.
A importância dessas cavernas reside em seu potencial para proteger contra as condições adversas do espaço, como temperaturas extremas e radiação. Além disso, se houver vestígios de vida ou água congelada, esses locais são ideais para investigações.
Essas estruturas servem como uma proteção natural contra radiação ionizante, flutuações térmicas extremas e impactos de meteoritos. Assim, a próxima geração de robôs será designada para explorar esses tubos de lava em Marte e na Lua, avaliando suas condições.
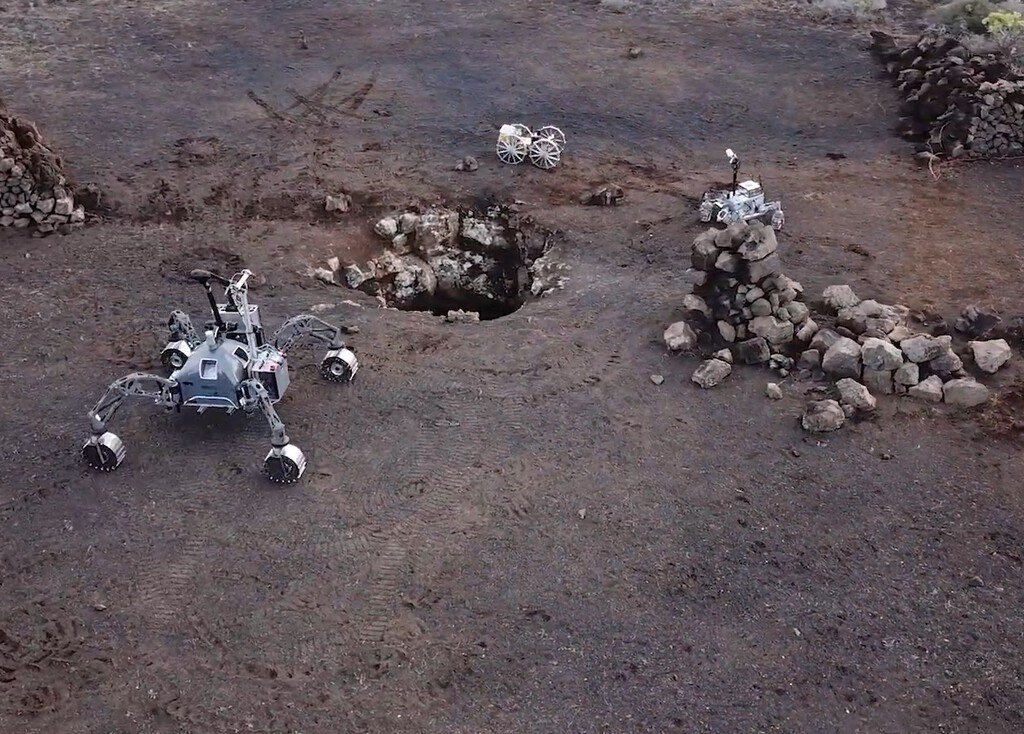
Em Lanzarote, três robôs com funções distintas iniciaram uma missão de exploração do tubo de lava de La Corona sem GPS ou luz solar:
- Um robô vigia mapeia a entrada do tubo.
- O explorador, um cubo equipado com câmeras, é lançado para observar o interior.
- O espeleólogo desce a 235 metros de profundidade para investigar.
O objetivo da missão, liderada pelo Centro Alemão de Inteligência Artificial, incluía a realização de um mapeamento 3D à medida que os robôs avançavam. Importante destacar que os robôs operaram de forma autônoma, tomando decisões durante a exploração, uma habilidade crucial, já que a comunicação com a Terra pode ter um atraso significativo.
O teste de robótica espacial heterogênea e cooperativa foi bem-sucedido, embora ainda existam oportunidades de aprimoramento na navegação em ambientes sem luz e na resposta dos sensores a interferências.